自动驾驶汽车是如何学会巧妙的通过交叉路口的
- 2017-09-08 14:25:00
- 网站编辑 转贴 车联网周刊
- 阅读量 3184
在亚利桑那州的钱德勒,Alphabet测试了其自动驾驶汽车,它的软件遇到了以前从未遇到过的,这是一个闪烁的黄色左转信号。
当信号闪烁时,司机(包括人和机器人)都会预计迎面而来的是行驶中的车辆。这对人类而言,过交叉路口都比较困难,更不用说一个从未遇到过像这样的交通灯的自动驾驶汽车了。

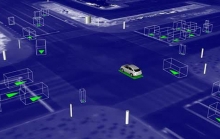
自动驾驶汽车后面的安全驾驶员接管了它,它的研究人员将这一事件转化为一个虚拟仿真,在那里,公司可以教软件如何处理这种情况。
这是在路上获得完全自动驾驶汽车的关键部分,由于Alphabet的车辆几乎不可能遇到每一种驾驶场景,所以测试虚拟的和具有挑战性的情况是确保这些汽车在任何时候都能安全驾驶的关键。
在所有情况和地理区域都能驾驶的情况下,自动驾驶汽车才被认为是能够完全自动驾驶的。这就是为什么Alphabet经常会进行自动驾驶汽车测试的原因,更多的驾驶体验意味着Alphabet的汽车应该能够导航更多的场景。
今天,Alphabet的自动驾驶汽车行驶超过了三百万英里的真实里程,但在模拟中,Alphabet的汽车每天行驶约八百万英里。在2016年,Alphabet的自动驾驶汽车开启了25亿英里的模拟测试。
模拟团队的首席软件工程师詹姆斯·斯托特(James Stout)告诉记者,“在模拟测试中,我们重点关注最有趣的驾驶和最具挑战性的场景,你可能会在每一百万英里(在实际的道路上)看到一个具有挑战性的环境。在模拟测试中我们可以模拟这些环境。”
这只是一个例子,但它说明了这些汽车学习如何在所有设置中驾驶。
詹姆斯·斯托特(James Stout)说:“我们不必在这个闪烁的黄灯下测试所有可能的变化。 相反,我们可以做的是通过给出示例场景来教会我们的汽车有基本技能,以确保它学会了这些基本技能,也确保它能够处理所有版本的这种情况。”
在这种情况下,汽车后面的安全驾驶员将接管,通常会注意到这是需要更多测试的场景。
Alphabet的自动驾驶工程师然后将回到他们创建的虚拟世界,通过重新创建这个确切的事件来测试汽车。工程师将使用相机、雷达和激光雷达系列中的实际数据,以便在遇到这种新情况时车辆中配备了列所建立的模型。
然后,工程师将为这个单一的场景添加数千个变体,这个过程,称为模糊,可以包括从快速行驶的汽车到摩托车分车道再到慢跑者沿着道路加任何东西。
一旦汽车驱动并重新驱动这种具体情况及其许多变化,那么该技能将被添加到其知识库中,并与Waymo的自动驾驶汽车网络共享。
现在,我们希望无论在哪种情况下,这些自动驾驶汽车都能够自信地左转。